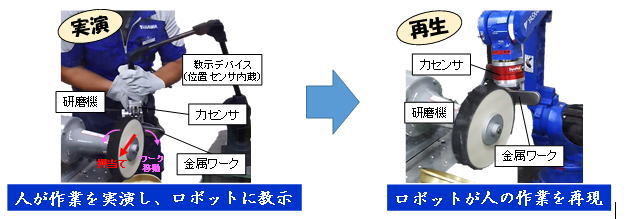
株式会社安川電機(代表取締役社長 小笠原 浩)は、研磨などの熟練を要する複雑な接触作業の ロボット化を促進するために、人がお手本を示す(実演する)ことでロボットに動きを直感的に教える「実演教示機能」を開発しました。
当社は長期経営計画「2025年ビジョン」でメカトロニクス技術とICT技術の融合に取り組み、新しい自動化のソリューションを提供することを掲げています。近年、先進国の少子高齢化による労働力不足、新興国の物価・賃金の上昇によるコスト増加が課題となっており、より一層の産業用ロボットの導入が期待されています。ところが、産業用ロボットには「教示」と呼ばれるロボットに動作を教える作業がユーザーにとって大きな負担になることがあり、導入障壁の一つになっていました。本機能により、教示に関するユーザーの負担を軽減するとともに、ロボットシステムの立上げ時間の大幅な短縮が可能となります。
実演教示機能の適用は、研磨や組立などの複雑な接触作業を見込んでおり、今後は実作業で検証しながら作業品質や使い勝手の向上を目指します。なお、この実演教示機能は、2017年6月21日(水)~23日(金)に開催されるロボット産業マッチングフェア北九州(会場:北九州総合展示場)に参考出品いたします。

 Global
Global

 ニュース・制作物
ニュース・制作物
 本社・施設見学
本社・施設見学
 資材調達
資材調達
 ソリューションコンセプト
ソリューションコンセプト サーボモータ
サーボモータ
 インバータ
インバータ
 産業用ロボット
産業用ロボット
















 財務・業績
財務・業績










 安川グループの
安川グループの コーポレート・ガバナンス
コーポレート・ガバナンス